Co-Author
Coming Soon
Underwater Hydroacoustic Textbook
Tij
Vishwakarma
Jaia Robotics, Inc.


Hi, my name's
Tij and
I am a
Mechanical Robotics Engineer
at Jaia Robotics
Inc. I have
a combined experience
of 3+ years,
with a proven
history of professional
and academic excellence,
as highlighted through this
portfolio. Currently, I
am open to new
opportunities across the
United States. Let's
talk!
Underwater Hydroacoustic Textbook
Florida Tech
Catania Product Development
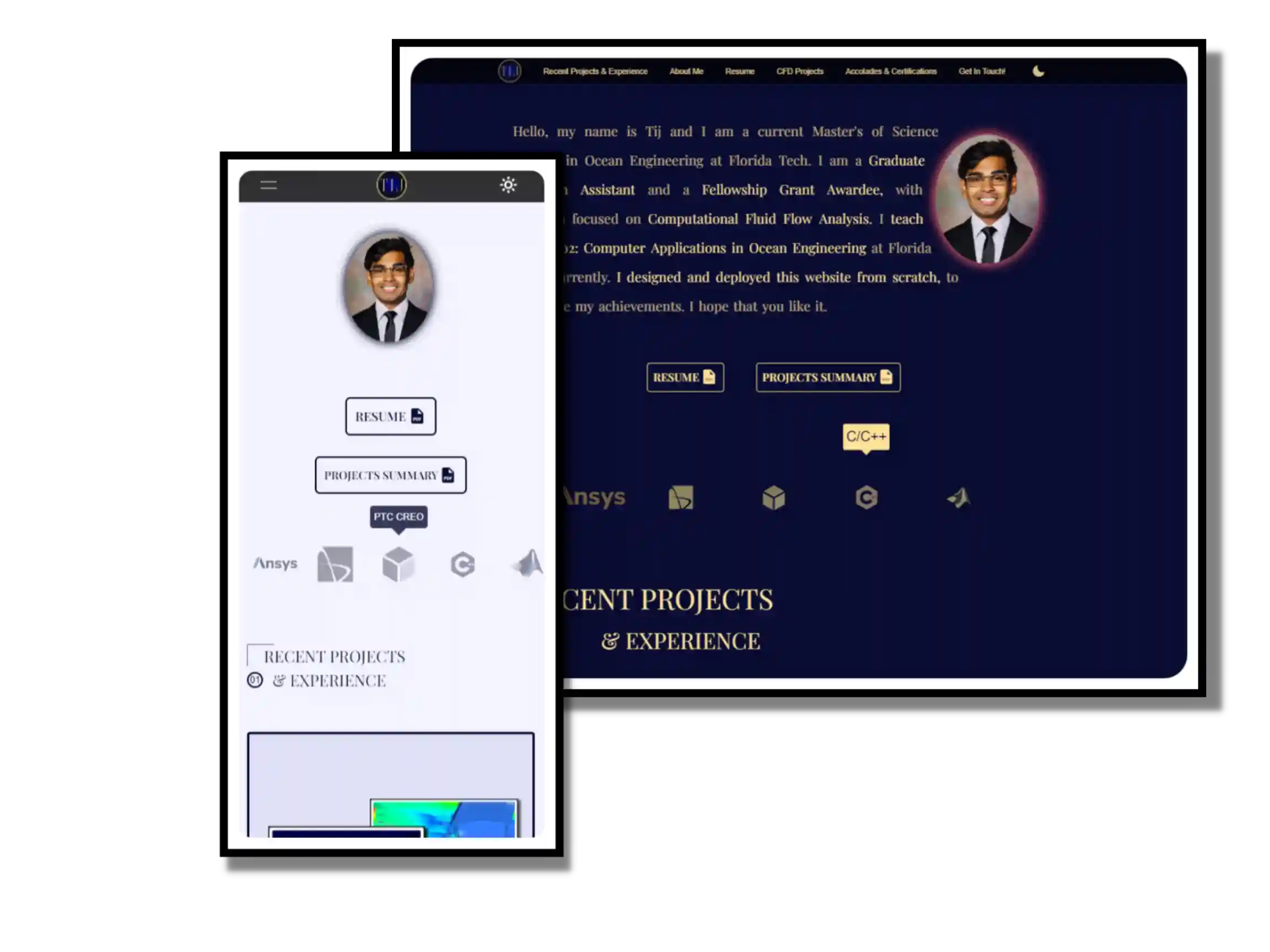
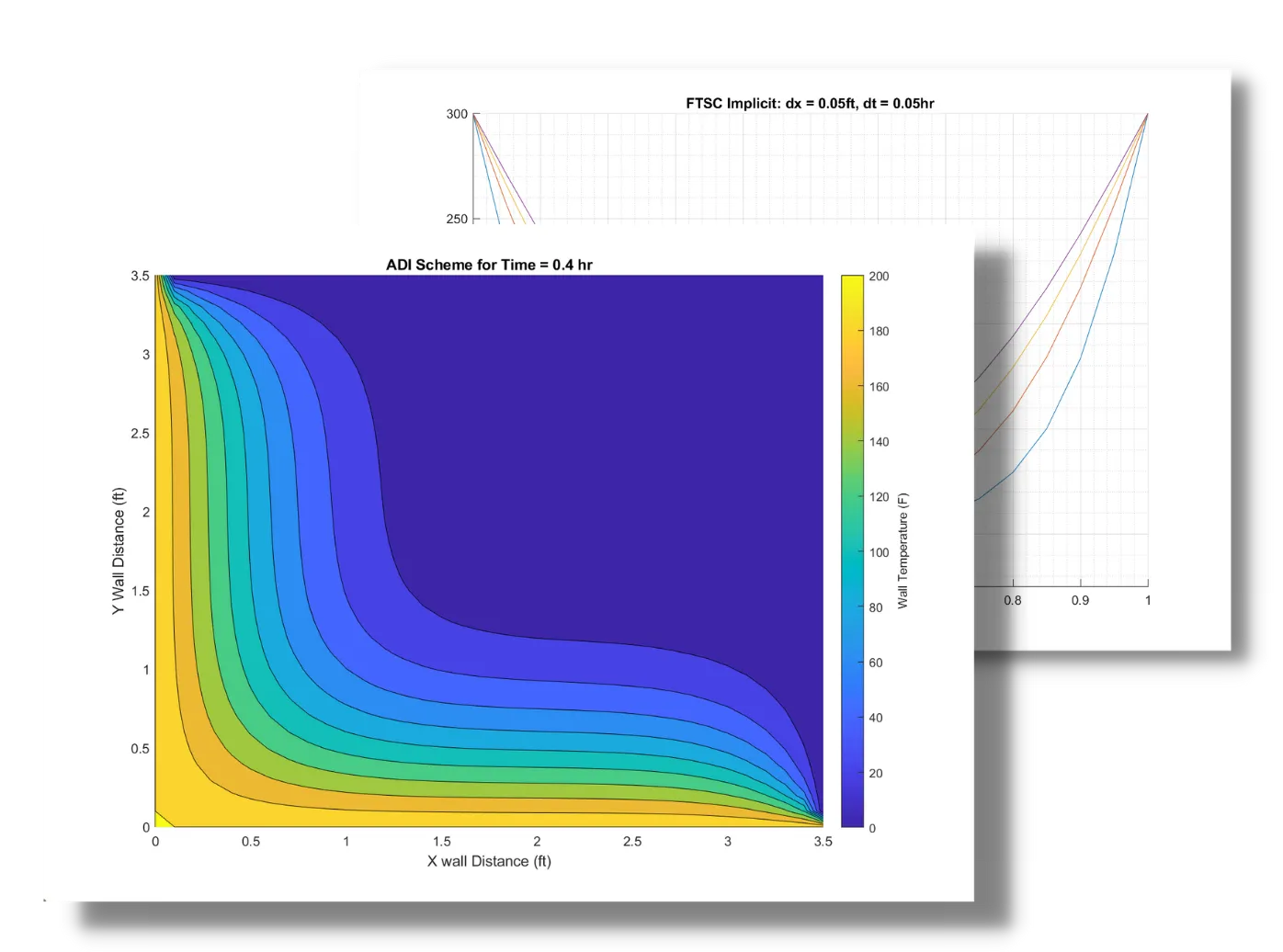
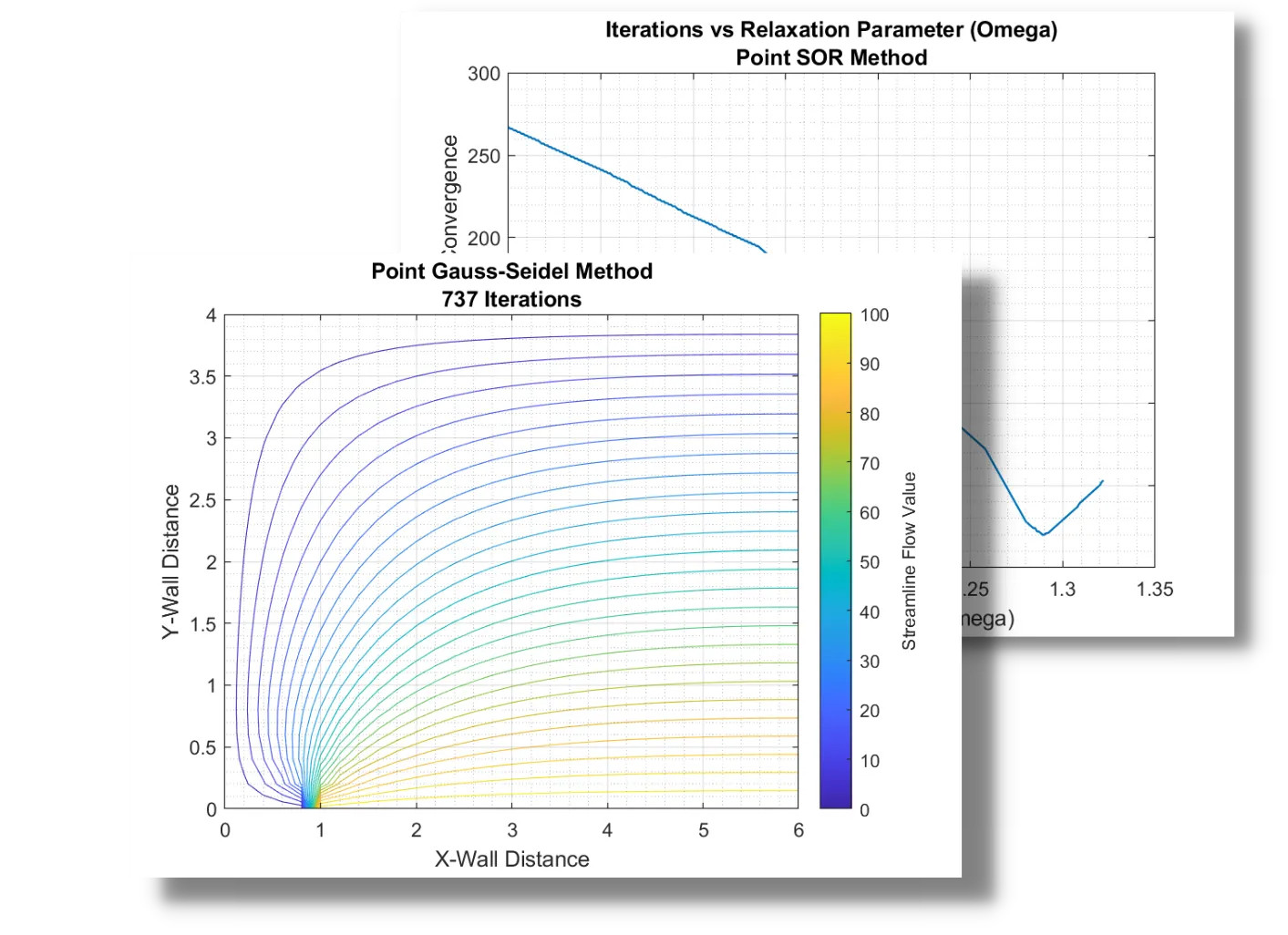
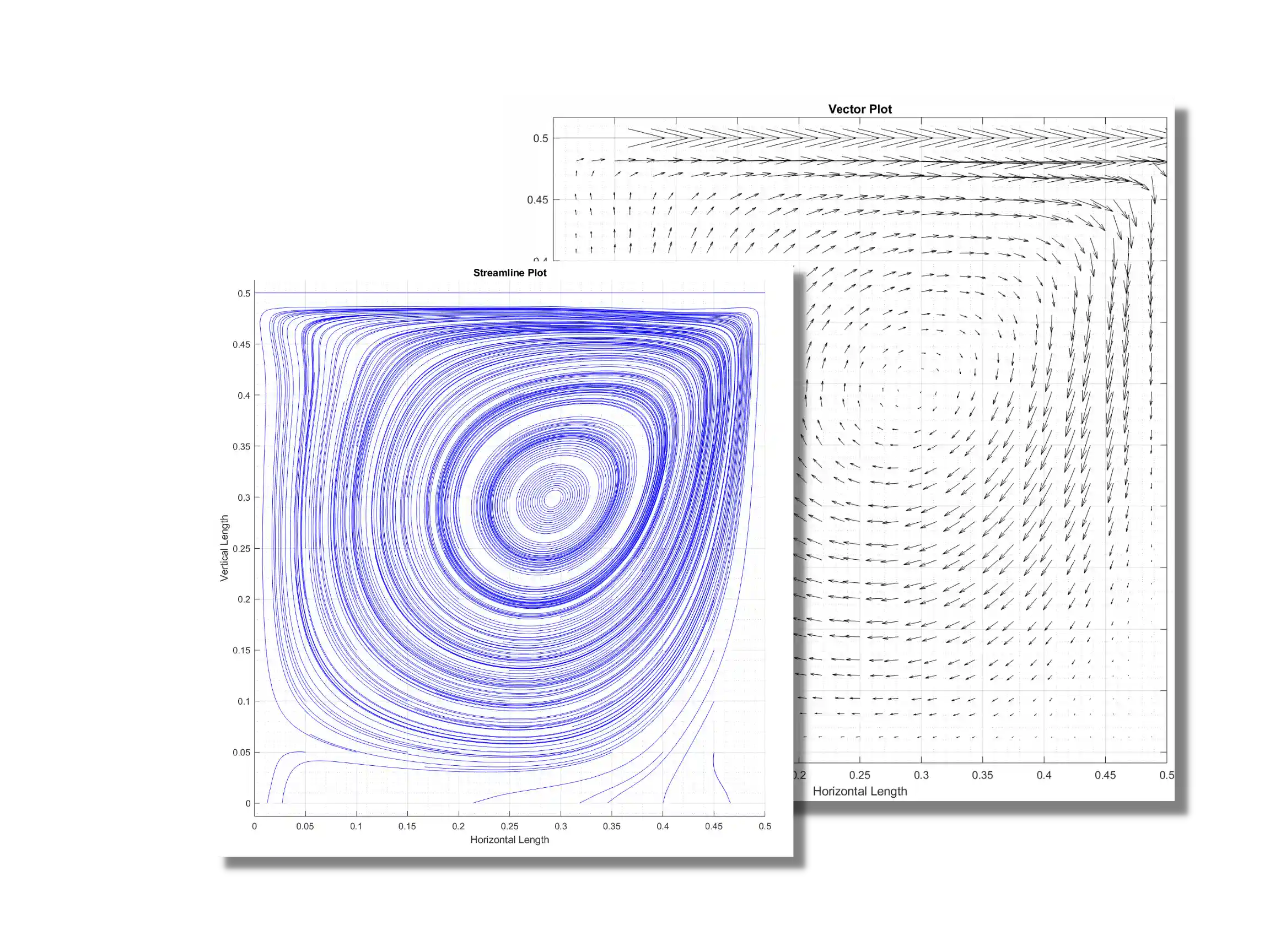
For OCE 5093 : Computational Fluid Dynamics (CFD) For Ocean Eng. at Florida Tech
Tank Diaphragm Analysis
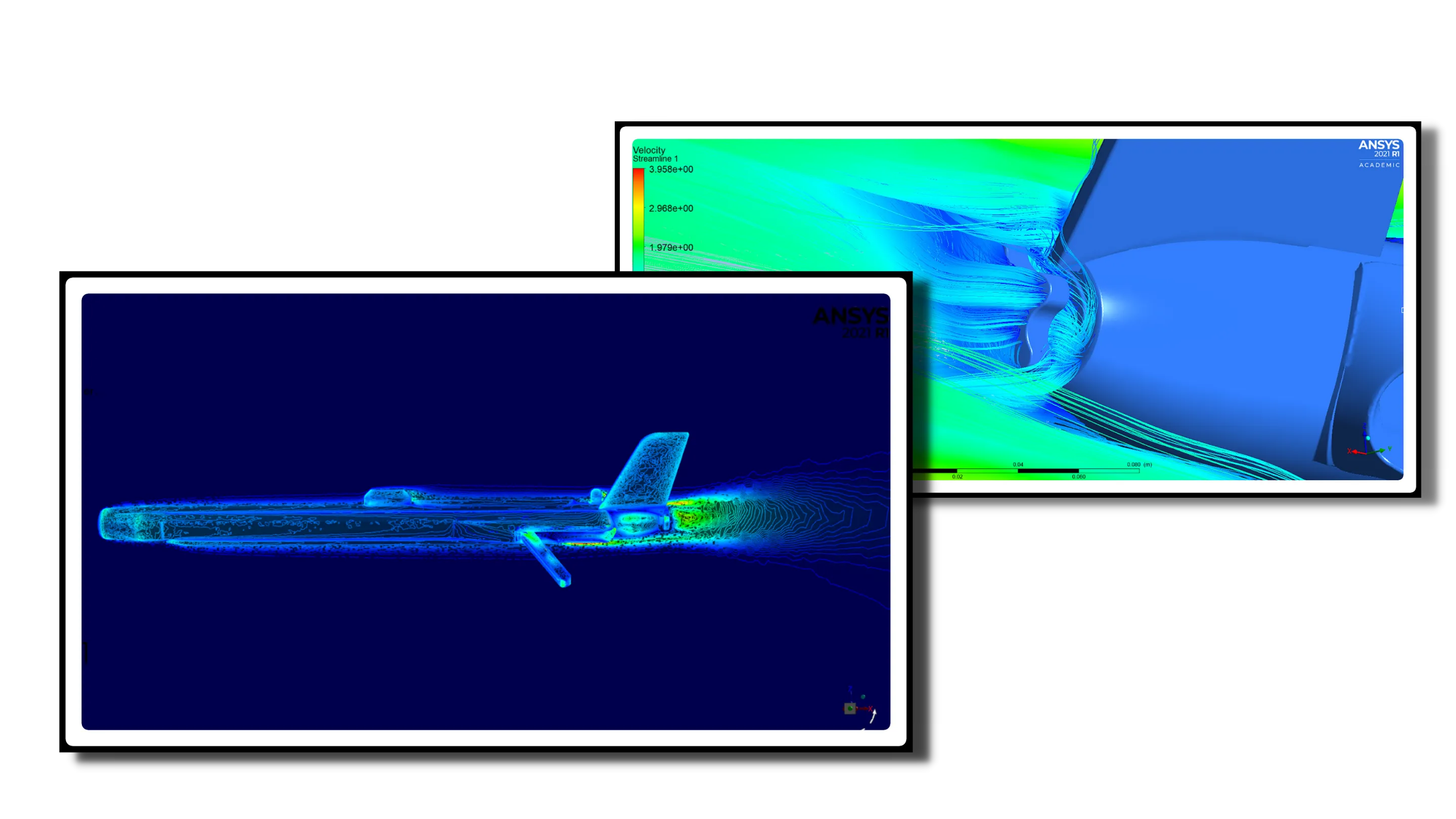
The Flying Fish Amphibious UAV
Manufacturing Process & Design of Tools Internship at Godrej & Boyce Mfg. Co. Ltd.
Nautilus Amphibious UAV/AUV




Going into my Master's degree, I wanted to become a well-balanced professional. Hence, while my current area of research is Computational Fluid Flow Analysis, my skill-set includes:
| ANSYS FLUENT | STAR CCM+ | SOLIDWORKS |
| SLA/SLS 3D Printing | PTC CREO | C/C++ |
| MATLAB | FLOW 3D | JIRA |
| HTML | CSS | JavaScript |
These skills and experiences helped me lead the various projects showcased in this portfolio. Lastly, I also owe my success and growth to
Dr. Stephen Wood. I am forever grateful for his support and faith in me.
I can be reached via email or cellphone. Both of which are in my resume, for security & privacy reasons.






I am open to full-time opportunities! If you liked my work, let's discuss how you can benefit from my skills and experience!